An Aerial Cinematographer AI for Settlements in Minecraft–Toward Their Crowd Assessment
We designed a system that can automatically do aerial shooting of settlements in Minecarft worlds, such as those generated by generators submitted to the Generative Design in Minecraft Competition (GDMC). Using a decision tree method, this system learns the movement behavior of a player or a GDMC judge during their assessment of a settlement of interest. This supplementary page contains relevant information that cannot be placed in a two-page demo paper under submission.
You can see our source-code on GitHub here where experiment data are also included.
Contents
- Overview of the proposed cinematographer AI (with animation)
- Cross-validation Results
- Resulting Hyper-Parameters
- Video Clips
Overview of the proposed cinematographer AI (with animation)

Cross-validation Results
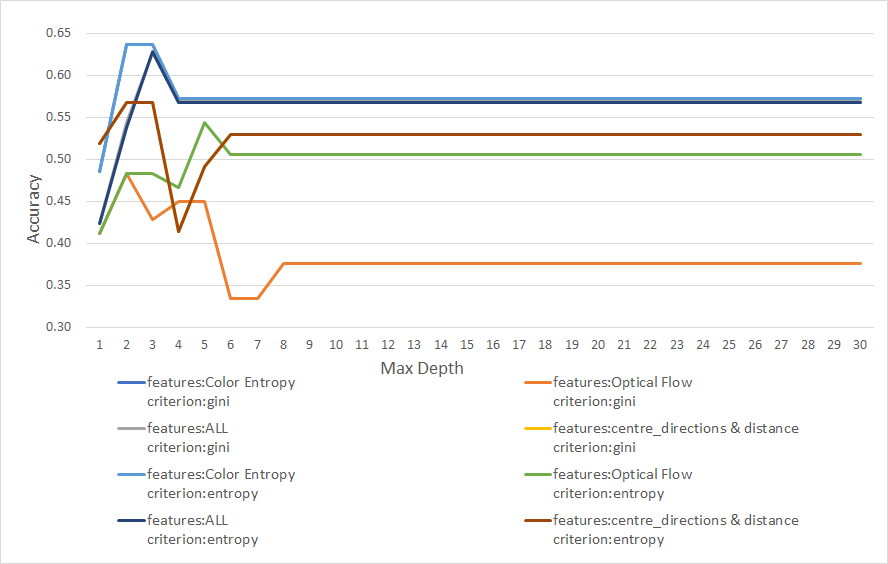
We divided training data of each of the three players in our experiment into three groups according to the distance range (see Table I below), and performed two-fold cross-validation using the training data for each group to find an appropriate set of hyper-parameters (a subset of features, a decision-tree criterion gini or entropy, the max depth) to build a decision tree model.
For example, the cross-validation results in the figure below are for Player 1 at the medium distance range (1/3 <= d < 2/3):
Resulting Hyper-Parameters
Using resulting hyper-parameters (shown in the following table), we created 3 models for different distance ranges per player.
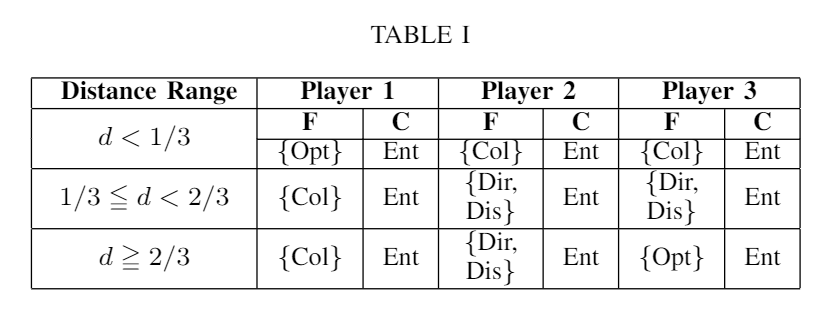
- F : Set of Features
- C : Criterion
- Opt : The optical flow of the current scene
- Col : The color entropy of the current scene
- Dir : The direction from the current position and orientation toward the settlement center
- Dis : The distance between the current position and the settlement center
Video Clips
Below are videos shot at a test settlement by the player (left); the post-modification proposed system (middle) that always move toward the settlement center during the long-distance range, but moves according to the trained decision-tree model during the other distance-ranges; and a baseline system (right) that always moves toward the settlement center.